Final Project, ECE 602, April 2017
Sandeep Gurm, 20209799
Contents
Introduction
This paper will implement an algorithm that was created by Siddarth Joshi and Stephen Boyd from their IEEE paper titled Sensor Selection via Convex Optimization. Although several algorithms are presented in the paper, the main algorithm concerning localized 'swaps' will be the focus in this report.
Problem Statement/Formulation
The paper addresses the problem of selecting k sensors from among m possible sensors to minimize variation and noise in the signal of interest.
To minimize error, consider a set of m measurements characterized by  ; a subset of k measurements must be chosen to minimize the volume of the confidence 'ellipsoid'. Confidence as a statistical measure can be interpreted geometrically, the derivation is not covered in this report, but the lengthy review can be accessed in the main paper.
; a subset of k measurements must be chosen to minimize the volume of the confidence 'ellipsoid'. Confidence as a statistical measure can be interpreted geometrically, the derivation is not covered in this report, but the lengthy review can be accessed in the main paper.
In mathematical terms, the problem is expressed in equation (1):

Where S is the optimization variable which contains m possible measurements. Equation (1) can then be re-written in terms of an optimization problem (2):


The solution to (2) is the theoretical 'most optimum point', which can be denoted as  . Given that this problem is a Boolean-convex problem, it can be very time consuming and resource heavy to solve. To make it a computationally easier problem to solve, it helps to relax the constraints (i.e. make the constraints convex):
. Given that this problem is a Boolean-convex problem, it can be very time consuming and resource heavy to solve. To make it a computationally easier problem to solve, it helps to relax the constraints (i.e. make the constraints convex):


The solution to (3), given the relaxed constraints, is denoted as  . Theoretically, is considered to be an upper bound on , which is the optimal objective value of the original optimization problem (2). Formally, an optimality gap can now be formulated as:
. Theoretically, is considered to be an upper bound on , which is the optimal objective value of the original optimization problem (2). Formally, an optimality gap can now be formulated as: 
Finally, the problem that the authors seek to solve can be formulated - given that and can be found, is there a method to optimize so that the optimality gap can be minimized?
The authors propose a method that involves swapping the sensors that comprise to narrow the optimality gap. Their proposed method will be implemented and tested in the following sections.
Proposed Solution
To solve the relaxed constraint cost function (3) in CVX, the solver will attempt to solve the log-determinant function iteratively, which can be very time consuming. To replicate the method the authors used would involve writing a solving routine via Newton's method, which is not the intent of this report. Rather, the goal of this report is to utilize CVX and implememnt novel algorithms. However, the authors do suggest alternative cost functions, one of which is shown in equation (4). This cost function is much faster to solve as it is based on mean squared error, which can be generalized as the trace of the covariance:


The solution can be found by utilizing CVX. Then, sensors that comprise the optimal solution can be swapped and compared with a cost function (5) to see if the optimality gap has been reduced.
![$$S = I + \Big[\begin{matrix} a_j^T\\ a_l^T\\ \end{matrix}\Big]
\hat{\Sigma} \Big[ \begin{matrix} -a_j\ a_l\ \end{matrix}\Big]\;\;\;(5)$$](main_eq99262.png)
Where  is the sensor swapped out, and
is the sensor swapped out, and  is the sensor that has been swapped in.
is the sensor that has been swapped in.
The determinant of (5) is taken to see if it is greater than 1; if so, the  is greedily updated as shown in (6), as are the
is greedily updated as shown in (6), as are the  values. The equation in (6) is also known as the Woodbury formula.
values. The equation in (6) is also known as the Woodbury formula.
![$$\hat{\Sigma}=\hat{\Sigma}-\hat{\Sigma}\Big[ \begin{matrix} -a_j\ a_l\
\end{matrix}\Big]S^{-1}
\Big[\begin{matrix} a_j^T\\ a_l^T\\ \end{matrix}\Big]\hat{\Sigma} \;\;\;(6)$$](main_eq89585.png)
This update process for continues until an optimality condition is reached. In simple terms, algorithmically,the flow is as follows:
- Find upper bound, lower bound, and z optimal
- Swap sensors in z optimal with excluded sensors
- Did the swap decrease the cost function? If yes, update z optimal with the swap as well as the covariance metric
- With the new z optimal, re-do the swapping function to see if a better solution can be found (i.e.
 swaps)
swaps) - Continue until there are no more swaps occuring, or the limit of iterations is reached
- Compare the resultant optimality gap as a result of swaps
Data sources
The data used for this implementation is derived from the paper;  sensors with
sensors with  parameters to estimate with a
parameters to estimate with a  distribution
distribution
clear all % Data generation occurs in this snippet of code m = 100; % number of sensors n = 20; % dimension of x to be estimated kones = ones(1,100); randn('state', 0); A = randn(m,n)/sqrt(n); % end data generation
Solution
[m, n] = size(A); kstart = 20; kfin = 45; i=0; kappa = log(1.01)*n/m; onemat = ones(m); limit = (10*m^3/n^2); for k=kstart:1:kfin i=i+1; %CVX Optimization begins here cvx_begin quiet variable z(m,m) semidefinite diagonal minimize trace_inv(A'*z*A) subject to onemat'*z*onemat == k; %sum of z must equal k (have k sensors) 1 >= z(m,m) >= 0; cvx_end %CVX Optimization ends here z = diag(z,0); zsort=sort(z); %z is sorted highest to lowest thres=zsort(m-k); %treshold can also be arbitrary z_star=(z>thres); %threshold used for rounding values to 1 or 0 % Swap algorithm Low_bound(i) = log(det(A'*diag(z_star)*A)); %Low bound calc p_star = z; %p_star is the theoretical upper bound Upp_bound(i) = log(det(A'*diag(p_star)*A)) + 2*m*kappa; %Upper bound calc E_hat = inv(A'*diag(z_star)*A); %covariance matrix to be used in swapping alg cost func iteration=0; numswaps(i)=0; while iteration < limit swap=0; sens = find(z_star==1); no_sense = find(z_star==0); for in = sens' %look at all chosen sensors for out = no_sense' %look at all sensors not chosen iteration = iteration+1; Aj = A(in, :); Al = A(out,:); S = eye(2)+[Aj; Al]*E_hat*[-Aj' Al']; %cost function if(det(S) > 1) %eval cost function, if greater than 1, do a swap E_hat = E_hat - E_hat*[-Aj' Al']*inv(S)*[Aj; Al]*E_hat; z_star(out) = 1; %swaping out/in sensor selection z_star(in) = 0; swap=1; numswaps(i) = numswaps(i)+1; end end if swap==1 break; end end if swap==0 break; end end z_star2 = z_star; Low_bound2(i) = log(det(A'*diag(z_star2)*A)); %lower bound calculation end
Visualization of results
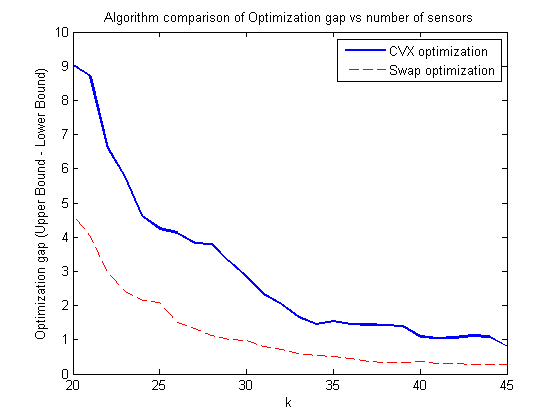
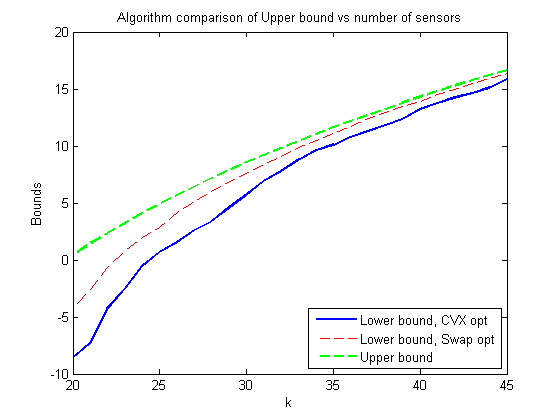
plot(kstart:1:kfin, Upp_bound - Low_bound, 'b', 'LineWidth', 2) hold on plot(kstart:1:kfin, Upp_bound - Low_bound2, '--r') legend('CVX optimization', 'Swap optimization') xlabel('k') ylabel('Optimization gap (Upper Bound - Lower Bound)') title('Algorithm comparison of Optimization gap vs number of sensors') hold off figure plot(kstart:1:kfin, Low_bound, 'b', 'LineWidth', 2) hold on plot(kstart:1:kfin, Low_bound2, '--r') plot(kstart:1:kfin, Upp_bound, '--g', 'LineWidth', 2) legend('Lower bound, CVX opt', 'Lower bound, Swap opt', 'Upper bound', 'Location', 'SouthEast') xlabel('k') ylabel('Bounds') title('Algorithm comparison of Upper bound vs number of sensors') hold off gap1 = Upp_bound-Low_bound; gap2 = Upp_bound-Low_bound2; fprintf('Optimality gap vs. Algorithm type\n'); % Where Gap1 represents the CVX optimization as a percentage of the upper % bound, and Gap2 represents the 'swapping' optimization as a percentage of % the upper bound. colLabel = 'Gap1% Gap2% k #Swaps'; iterationLabel = '20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45'; displayMat = [(gap1./Upp_bound.*100)', (gap2./Upp_bound.*100)', (kstart:kfin)', numswaps']; printmat(displayMat, 'resultstable', iterationLabel, colLabel)
Optimality gap vs. Algorithm type
resultstable =
Gap1% Gap2% k #Swaps
20 2030.11269 1046.93729 20.00000 17.00000
21 612.80811 282.15588 21.00000 13.00000
22 280.47687 126.69152 22.00000 21.00000
23 178.17819 74.23907 23.00000 24.00000
24 113.04822 52.81843 24.00000 32.00000
25 86.57224 42.65074 25.00000 20.00000
26 72.47622 26.40547 26.00000 31.00000
27 59.24683 20.58909 27.00000 32.00000
28 52.96512 15.84258 28.00000 34.00000
29 41.72061 12.69109 29.00000 35.00000
30 32.96733 11.29026 30.00000 30.00000
31 25.26395 8.66782 31.00000 25.00000
32 20.85132 7.41328 32.00000 26.00000
33 15.86314 5.73150 33.00000 35.00000
34 13.12514 5.01844 34.00000 26.00000
35 13.23067 4.31916 35.00000 30.00000
36 11.88522 3.71346 36.00000 30.00000
37 11.30635 2.86449 37.00000 33.00000
38 10.71523 2.63451 38.00000 37.00000
39 10.11508 2.42011 39.00000 41.00000
40 7.62463 2.61308 40.00000 40.00000
41 7.08772 2.01194 41.00000 29.00000
42 6.96776 1.98211 42.00000 33.00000
43 7.12046 1.77253 43.00000 32.00000
44 6.71531 1.63843 44.00000 35.00000
45 4.82486 1.62914 45.00000 27.00000
Analysis and conclusions
The implementation in this report had a slight difference to the algorithm Joshi & Boyd implemented by utilizing a different cost function; however, the results were identical. The authors were able to get convergence of their swapping implementation at  , which was also demonstrated in this report.
, which was also demonstrated in this report.
It was found that the swapping optimization algorithm fared much better than non-swapping. Using localized swaps, the algorithm converges much faster to the optimality gap with a reasonable number of swaps (i.e. much less than swaps.
From the results, it is shown that when using the swapping algorithm, getting within 5% of the Upper Limit is possible by selecting sensors; adding additional sensors continues to reduce the gap, and it is shown that the percentage approaches 0 with the higher number of sensors selected.
There is a trade-off with computation speed. The method proposed by the authors is  - therefore for applications such as in real-time computing, it is important to place a limit on iterations or number of sensors to select depending on the final accuracy desired.
- therefore for applications such as in real-time computing, it is important to place a limit on iterations or number of sensors to select depending on the final accuracy desired.
Also, there is no clear trend of # of swaps vs. convergence; therefore, although the swap algorithm is , a modest number of swaps will achieve an accurate result.
References
- [1] Joshi, Siddharth, and Stephen Boyd. "Sensor selection via convex optimization." IEEE Transactions on Signal Processing 57.2 (2009): 451-462.
- [2] CVX Research, Inc. CVX: Matlab software for disciplined convex programming, version 2.0. http://cvxr.com/cvx, April 2017
- [3] M. Grant and S. Boyd. Graph implementations for nonsmooth convex programs, Recent Advances in Learning and Control (a tribute to M. Vidyasagar), V. Blondel, S. Boyd, and H. Kimura, editors, pages 95-110, Lecture Notes in Control and Information Sciences, Springer, 2008. https://stanford.edu/~boyd/papers/pdf/graph_dcp.pdf
- [4] Michailovich, O. (2017). ECE 602, Convex Optimization [Lecture notes]. Retrieved from https://ece.uwaterloo.ca/~ece602/outline.html