 |
||||||
| home research publications people open positions contact | ||||||
|
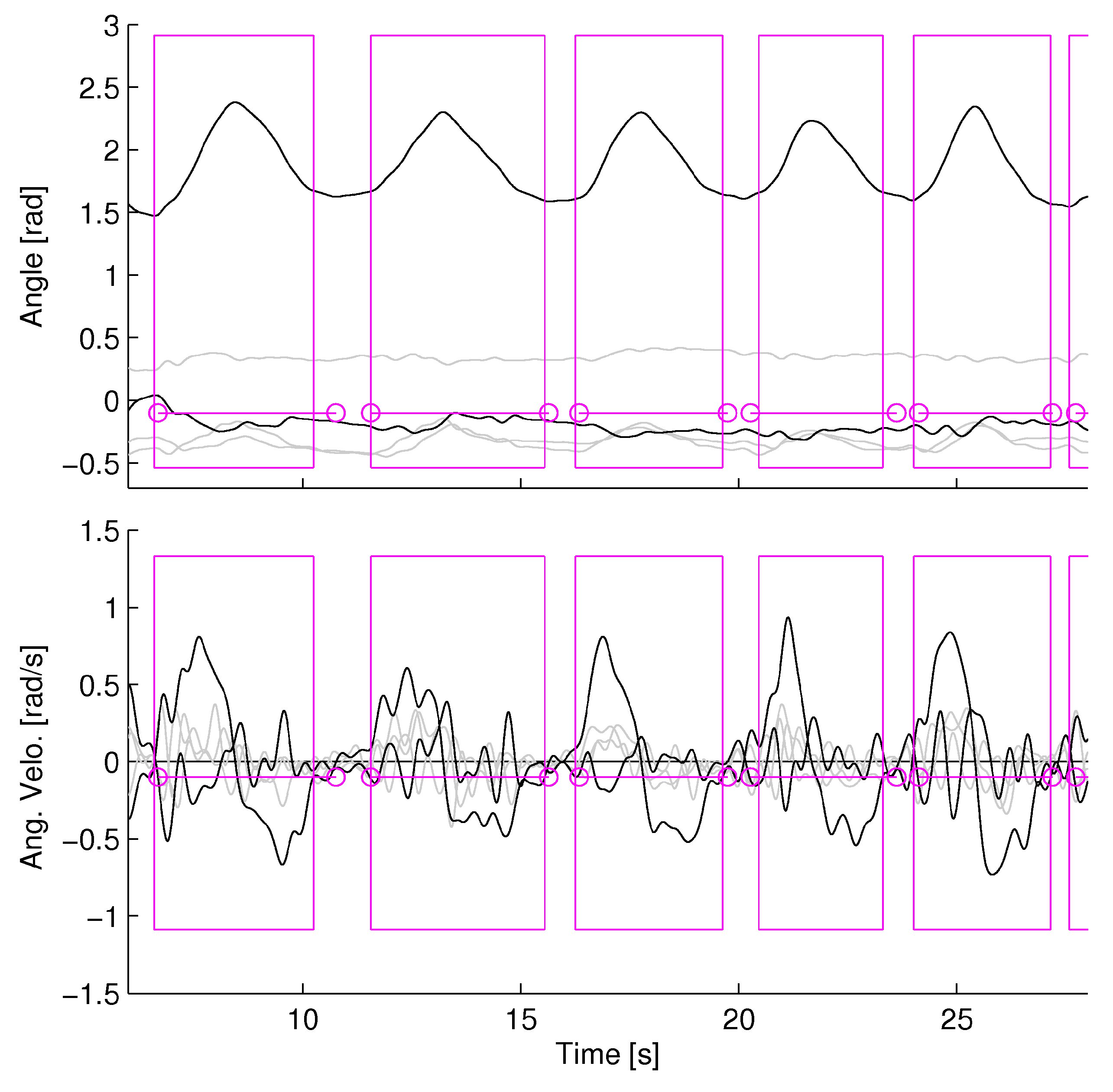
Rehabilitation Pose Estimation Ambulatory sensors such as accelerometers and gyroscopes are used to determine body posture. These data signals are combined using the Kalman filter with a forward kinematic model, allowing for the determination of local body joint angles in arbitrary 3D space. This system is used during physiotherapy exercises, so that specific joint angles at every timestep during the exercise can be derived. Segmentation and Identification Motion segments can be isolated in the observation sequence by using template data and the Hidden Markov model. For rehabilitation exercises, a logical segment point to apply to exercises is when the subject’s movement changes directions, such as changing from flexion motion to extension. This allows the windowing of segment potentials to be placed around zero-velocity crossings. The likelihood of the windowed motion being an exercise motion of interest can be assessed by pre-trained Hidden Markov models. Once the exercise motion is segmented, metrics such as velocity, time-to-completion and Euclidean distance error can be reported, providing both the rehabilitation participant and their physiotherapists with numerical data to assess patient progress. This research is a collaboration with Cardon Rehab Inc. and Dr. Mitchell Fergenbaum at Sheridan College. 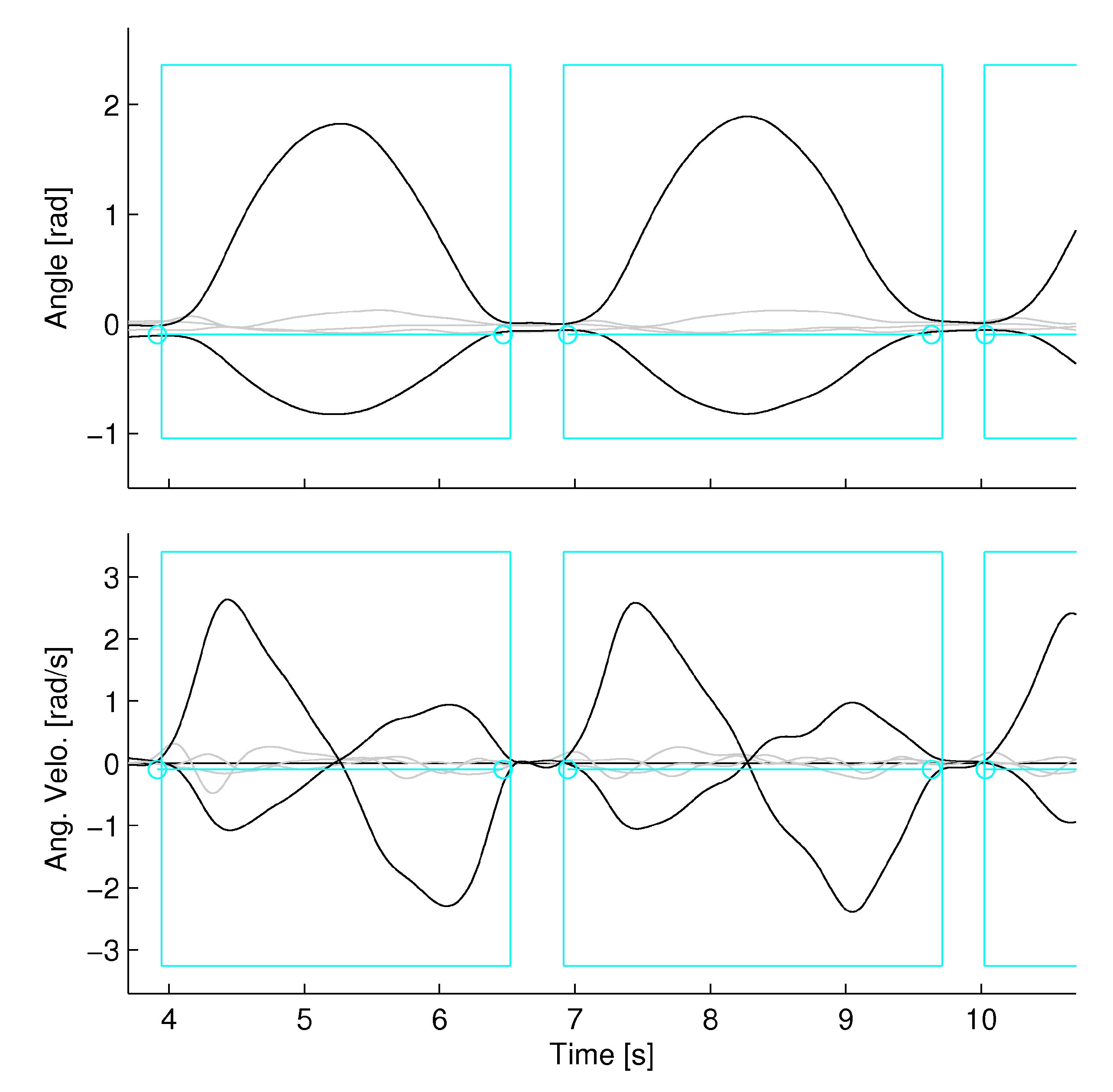
 Fatigue Estimation during Rehabiliation Exercises Traditionally, fatigue is measured by the observation of physiological data. Besides physiology, fatigue also influences the way a training exercise is performed. This work investigates whether fatigue can be estimated by observing training exercises. The database contains squat exercises recorded with optical motion tracking. Optical motion tracking provides high accuracy in resolution and results in high-dimensional data vectors. Classification accuracy improves by selecting the most relevant set of joints. A cyclic left-to-right HMM models the sequence of the training exercise. The hidden states are the different stances during the training exercise; see Figure 1 for a squat. The green circles illustrate the recorded marker positions. Variations in the performance are modeled by a parametric HMM. The parameter represents the level of fatigue and ranges from low to high fatigue. Challenges are differences in the way a training exercise is performed between subjects and in different ways how fatigue influences the movements during the exercises. This work is a collaboration with the Venture lab at the Tokyo University of Agriculture and Technology. This approach will be further applied to arm exercises which are assisted by a robot in stroke rehabilitation, in collaboration with the Intelligent Assistive Technology and Systems Lab (IATSL), Toronto, and supported by the Toronto Rehabilitation Institute (TRI). 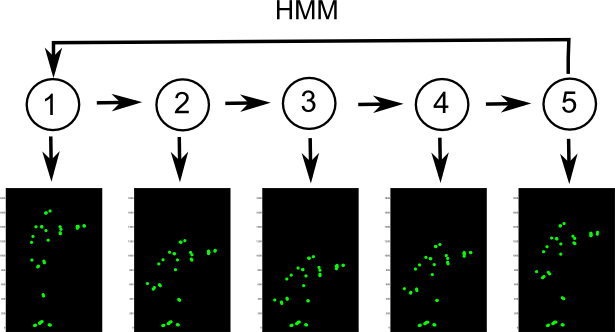 - video showing high fatigue motion - video showing low fatigue motion | ||||||
|
Researchers: Jonathan Lin, Michelle Karg, Roshanak Houmanfar, Christopher Thomas, Agnes Lam, Vladimir Joukov, Dana Kulić Key Publications: J. F. S. Lin and D. Kulić, Human Pose Recovery for Rehabilitation Using Ambulatory Sensors, IEEE Engineering in Medicine and Biology Conference, pp. 4799 - 4802, 2013. J. F. S. Lin and D. Kulić, Human Pose Recovery using Wireless Inertial Measurement Units, Physiological Measurement, Vol. 33, pp. 2099 - 2115, 2012. link J. F. S. Lin and D. Kulić, Segmenting Human Motion for Automated Rehabilitation Exercise Analysis, IEEE Engineering in Medicine and Biology Conference, pp. 2881 - 2884, 2012. pdf D. Kulić, G. Venture and Y. Nakamura, Detecting Changes in Motion Characteristics during Sports Training, IEEE Engineering in Medicine and Biology Conference , pp. 4011 - 4014, 2009. pdf | ||||||