 |
||||||
| home research publications people open positions contact | ||||||
|
Safety for Human-Robot Interaction 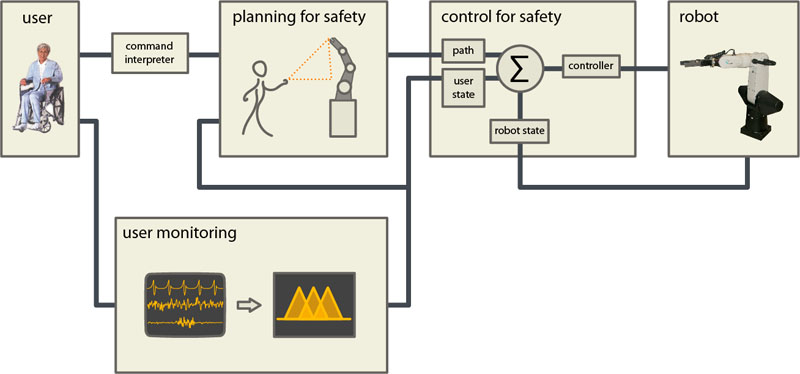 This research was conducted at the CARIS Laboratory at the University of British Columbia, working with Prof. Elizabeth Croft. The goal of this research was to develop a human-robot interaction strategy that ensures the safety of the human participant through planning and control. We focused on quantifying the level of danger present in the interaction, and then acting to minimize that danger, both in the planning stage and during real-time control. A key requirement for improving safety is the ability of the robot to perceive its environment, and specifically the human behavior and reaction to robot movements. This work also examined the feasibility of using human monitoring information (such as gaze direction, head rotation and physiological monitoring) to improve the safety of the human–robot interaction. A key result of the research was a systematic definition of this interaction strategy applicable to a range of human-robot interaction tasks, and a prototype implementation and experimental validation. These videos show the operation of the integrated system under a variety of conditions: - localized trajectory scaling - trajectory scaling due to a path obstruction - safety module intervention due to a path obstruction - response to changes in head orientation - response to human affective state A sample experiment testing the Safety Module can be seen here. |
||||||
|
Key Publications: D. Kulić and E. Croft, Pre-Collision Safety Strategies for Human-Robot Interaction, Autonomous Robots, Vol. 22, No. 2, pp. 149 – 164, 2007. link D. Kulić and E. Croft, Affective State Estimation for Human-Robot Interaction, IEEE Transactions on Robotics, Vol. 23, No. 5, pp. 991 – 1000, 2007. link | ||||||