

The error analysis for the false-position method is not as easy as it is for the bisection method, however, if one of the end points becomes fixed, it can be shown that it is still an O(h) operation, that is, it is the same rate as the bisection method, usually faster, but possibly slower. For differentiable functions, the closer the fixed end point is to the actual root, the faster the convergence.
To see this, let r be the root, and assume that the point b is fixed. Then, the change in a will be proportional to the difference between the slope between (r, 0) and (b, f(b)) and the derivative at r. To view this, first, let the error be h = a - r and assume that we are sufficiently close to the root so that f(a) ≈ f(1)(r) h. The slope of the line connecting (a, f(a)) and (b, f(b)) is approximately f(b)/(b - r). This is shown in Figure 1.
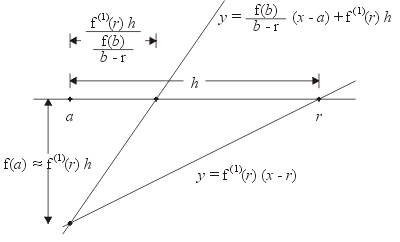
Figure 1. The function f(x) near a and r with one iteration of the false-position method.
The error after one iteration is h minus the width of the smaller shown interval, or: