The templated C++ class Slerp<T, S> defines a spherical linear interpolation (Slerp) between two points. The points may be of one of the following types:
Such a construction makes no sense for complex numbers and therefore this is excluded.
The constructor Slerp( const T &, const T & ) takes two arguments: the two points which are to be interpolated. These should be unit imaginary numbers.
The single member function with signature T value( S t ) const; where S is either float, double or long double for a value 0 ≤ t ≤ 1 returns the point on the linear interpolating curve.
The best in this case is an example. The following code produces a spherical linear interpolating curve between the two unit imaginary quaternions q1 = 0.6i + 0.8j and q2 = −0.8i − 0.6k.
#include "Quaternion.h"
#include "Slerp.h"
#include <iostream>
using namespace std;
int main() {
Quaternion<double> q1(0, 0.6, 0.8, 0.0);
Quaternion<double> q2(0, -0.8, 0.0, -0.6);
Slerp<Quaternion<double>, double> slrp( q1, q2 );
for ( int i = 0; i <= 10; ++i ) {
cout << 0.1*i << '\t' << slrp.value( 0.1*i ) << endl;
}
return 0;
}
The output is a sequence of points which are equally spaced on the unit sphere:
0 0 + 0.6i + 0.8j + 0k 0.1 0 + 0.46714i + 0.872923j - 0.140664k 0.2 0 + 0.314307i + 0.908523j - 0.275314k 0.3 0 + 0.148035i + 0.905278j - 0.398192k 0.4 0 - 0.0245656i + 0.863327j - 0.504046k 0.5 0 - 0.196116i + 0.784465j - 0.588348k 0.6 0 - 0.359282i + 0.672061j - 0.647496k 0.7 0 - 0.507086i + 0.530923j - 0.678959k 0.8 0 - 0.633209i + 0.367085j - 0.681392k 0.9 0 - 0.732259i + 0.187552j - 0.654692k 1 0 - 0.8i + 5.55112e-17j - 0.6k
Using the 1001 points t = 0, 0.001, 0.002, ..., 0.999, 1, we get the plot shown in Figure 1.
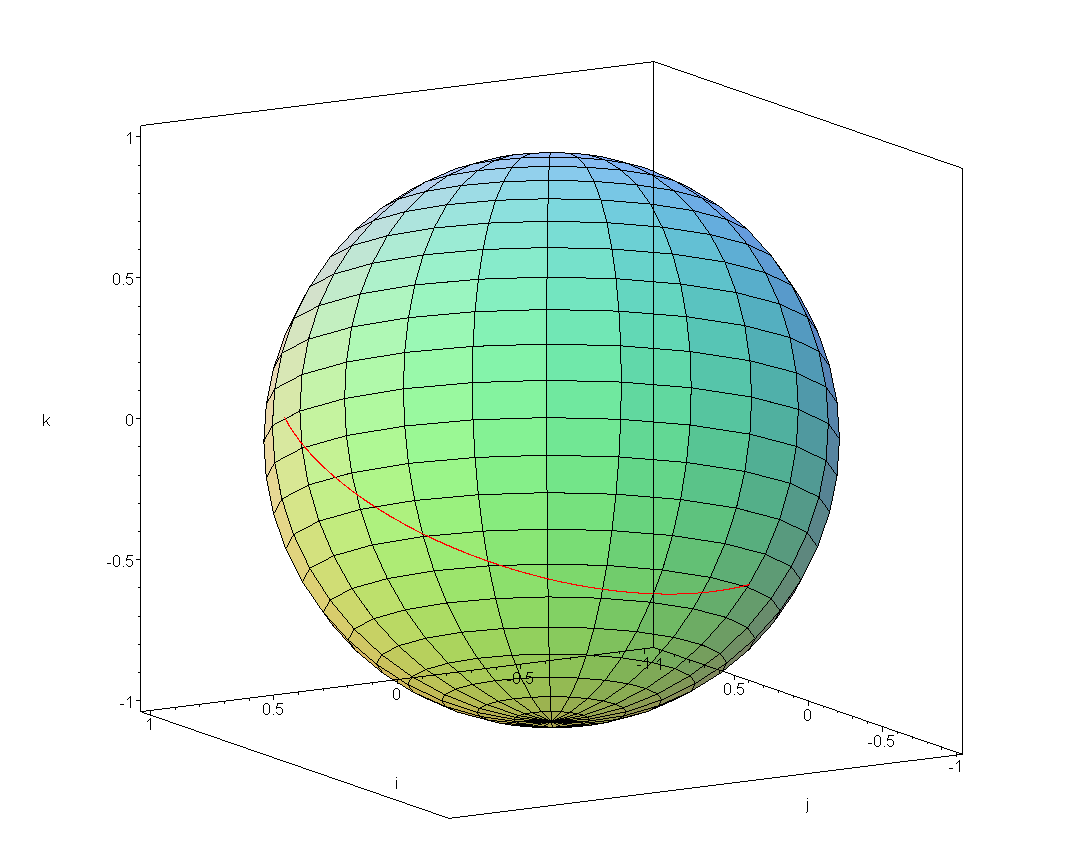
Figure 1. A spherical linear interpolation between q1 = 0.6i + 0.8j and q2 = −0.8i − 0.6k.
References
- Ken Shoemake, Animating Rotation with Quaternion Curves, SIGGRAPH 95.
- Erik B. Dam, Martin Koch, Martin Lillholm, Quaternions, Interpolation and Animation, Technical Report DIKU-TR-98/5.